26.05.2001 Schlachtfest
Für die neueste Version der virtuellen
Stabistange sollen nicht mehr die Piezo Elemente, sondern die viel moderneren
und besseren SMM Sensoren zum Einsatz kommen. Aber woher nehmen?
Viele Anfragen bei Herstellerfirmen brachten
kein brauchbares Ergebnis. Einige Firmen sind gerade erst in der Entwicklungsphase,
und das Produkt ist noch nicht produktionsreif, einige liefern nur an Großkunden,
und andere reagierten überhaupt nicht auf meine Anfragen.
 Da
ich aber nicht auf die hervorragende Präzision der SMM Elementre verzichten
möchte blieb mir nichts anderes übrig, als die Sensoren aus zwei
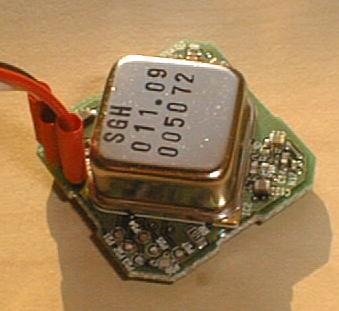
Futaba SMM Kreiseln auszuschlachten. Leider bekommt man sowas derzeit auch
nicht als Ersatzteil, den anscheinend sind die Dinger nicht kaputtzukriegen.
Um den Schmerz über die Kosten möglichst gering zu halten, verwendete
ich die billigsten verfügbaren kreisel, die GY240 von Futaba. In Allen
SMM Kreiseln ist derselbe Sensor drin, sogar die Elektronik scheint bei
den kleineren Kreiseln völlig identisch zu sein.
Da
ich aber nicht auf die hervorragende Präzision der SMM Elementre verzichten
möchte blieb mir nichts anderes übrig, als die Sensoren aus zwei
Futaba SMM Kreiseln auszuschlachten. Leider bekommt man sowas derzeit auch
nicht als Ersatzteil, den anscheinend sind die Dinger nicht kaputtzukriegen.
Um den Schmerz über die Kosten möglichst gering zu halten, verwendete
ich die billigsten verfügbaren kreisel, die GY240 von Futaba. In Allen
SMM Kreiseln ist derselbe Sensor drin, sogar die Elektronik scheint bei
den kleineren Kreiseln völlig identisch zu sein.
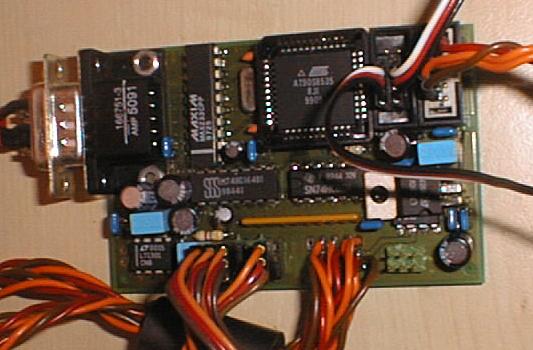
Der Sensor benötigt eine sauber geglättete
Spannung von 5 V. Das überprüfte ich nochmals an der laufenden
GY240 Elektronik. Auch hier hat sich gegenüber dem GY501 nichts verändert.
Sehr angenehm ist, daß der Sensor ein vorverstärktes Signal
von 0-5V liefert, daß direkt an den Microcontroller zu AD Wandlung
übergeben werden kann. Erste Tests zeigten ein interessantes Verhalten:
Der SMM Sensor hat eine hohe Empfindlichkeit im Bereich kleiner Drehraten,
was aber dazu führt, daß er bei etwa 100 Grad/Sekunde bereits
am "Anschlag" ist. Für meine Anwendung also ideal geeignet. Für
den Heckrotor ist das eigentlich nicht so gut geeigent, denn man kann damit
Piruetten, die schneller als 100 Grad/Sekunde drehen nicht mehr sauber
ausregeln. Und 4 Sekunden für eine Piruette ist ja nun nicht so wahnsinnig
schnell.. Die Kreiselelektronik muß also mit dem Meßbereichsende
rechnen, da hier keine Dynamik mehr vorhanden ist!
 DIe
Sensoren sind mit genau 3 Pins mit der Elektronik verbunden, 0V, 5V und
Signal. Mehr nicht. In Ruhe ist am Signal 2,5V zu messen. Also wurden die
drei Pins gekappt, und mit dem nun überflüssigen Anschlußkabel
des Kreisels verbunden. Somit kann der Sensor direkt auf den Stecker auf
der Steuerplatine gesteckt werden.
DIe
Sensoren sind mit genau 3 Pins mit der Elektronik verbunden, 0V, 5V und
Signal. Mehr nicht. In Ruhe ist am Signal 2,5V zu messen. Also wurden die
drei Pins gekappt, und mit dem nun überflüssigen Anschlußkabel
des Kreisels verbunden. Somit kann der Sensor direkt auf den Stecker auf
der Steuerplatine gesteckt werden.
Ein einfaches Testprogramm, daß die
gewandelten Werte integriert, zeigte bereits die Überlegenheit der
SMM Sensoren. Bereits winzigste Richtungsänderungen im Bereich
von Millimetern konnten sehr sauber detektiert werden. Auch die Linearität
und die Empfindlichkeit waren vorbildlich. Ganz egal wie schnell man den
Sensor bewegt (gedreht) hat, das Servo kam immer genau an der gleichen
Stelle wieder zum stehen, wenn der Sensor die Ursprungsposition eingenommen
hat. Auch nach 20 Minuten war noch alles neutral. Beeindruckend!
Dennoch ist auf dem Ausgangssignal ein
geringes Rauschen zu beobachten, daß herausgefiltert werden muß.
Da ich keine Analogschaltung mehr dazwischensetzen wollte, wird der AD
Meßwert einfach sehr häufig erzeugt, und dann ein mathematischer
Mittelwert gebildet. Somit erhält man ein sehr sauberes nutzbares
Signal. Wenn der Wert anschließend Integriert wird (HH Mode), kann
man sich das sparen, denn das Rauschen fällt dabei ohnehin heraus.
Die Sensoren brauchen schon etwas Strom.
Auf der 5V Seite fallen etwa 40mA an. Da ich die 5V mit einem Längsregler
aus einer Hilfsspannung von 12V erzeuge, die wiederum per Schaltwandler
aus dem Empfängerakku erzeugt wird, ist die Stromaufnahme der gesamten
Elektronik nun 200mA(bei 5 Zellen bei 4 Zellen sind es 250mA). Das ist
zwar nicht besonders sparsam, bleibt aber noch im Rahmen.
Inzwischen ist das Programm der alten Elektronik
auf die neuen Bedingungen angepasst, und ich bin gerade dabei Gehäuse
für die Elektronik zu bauen. Ich bin schon sher gespannt auf die Flugerprobung
der vituellen Stabistange im "neuen" E-Power (der mit dem Actro 40-4).