01.04.2001 weitere Tests
Gestern und heute konnte ich wegen des
Guten Wetters und einer Einladung von Mark Juhrig, der mir seinen Laptop
zur Verfügung stellte, viele Testflüge ausführen. Am Samstag
war die Testerei jedoch schnell beendet, weil eine aufschaukelnde Schwingung
dazu geführt hat, daß der Heckrotor im Boden eingehakt hat,
und die Heckblätter zerstört wurden. Außerdem hat ein Kurzschluß
auf einer der Platinen zu einer undefinierbaren Störung geführt.
Glücklicherweise konnte ich den Fehler
aber schnell finden und beheben. Am Sonntag ging ich dann etwas vorsichtiger
ans Werk, und wollte mich von unten her der maximal möglichen Empfindlichkeit
nähern. Dennoch hatte ich bei den ersten Versuchen mit erheblichen
Schwingungen zu kämpfen. Dies kam daher, daß ich noch einen
Differenzialanteil im Gesamtsignalweg hatte, der aber überhaupt nichts
bringt, sondern nur die Schwingneigung erhöht. Die Regelsrecke ist
einfach zu langsam dazu.
 Inzwischen
hatte ich ein Programm erstellt, mit dem man die Parameter der Schaltung
bequem anpassen kann. Damit konnte ich nun den Differezialteil völlig
ausschalten, und dafür den Bell Anteil erhöhen. Außerdem
war eine Reduzierung der Wirkung des Integrators (Hiller Anteil) erforderlich.
Abwechselnde Flüge mit dem Power-E mit seinem 100% stabilisierten
Normalkopf und dem V-Stabi Heli zeigten eine immer bessere Annäherung
des Verhaltens.
Inzwischen
hatte ich ein Programm erstellt, mit dem man die Parameter der Schaltung
bequem anpassen kann. Damit konnte ich nun den Differezialteil völlig
ausschalten, und dafür den Bell Anteil erhöhen. Außerdem
war eine Reduzierung der Wirkung des Integrators (Hiller Anteil) erforderlich.
Abwechselnde Flüge mit dem Power-E mit seinem 100% stabilisierten
Normalkopf und dem V-Stabi Heli zeigten eine immer bessere Annäherung
des Verhaltens.
Zum Schluß konnte ich feststellen,
daß der V-Stabi Heli sogar besser flog, als der herkömmliche.
Besonders das Auswiegen von Bell und Hiller Anteil bringt hier den gewünschten
Erfolg. Der direkt wirkende Bell Anteil muß so eingestellt werden,
daß nach einem brutalen zyklischem Ausschlag der Heli nach Neutralisierung
der Knüppel genau in der ausgelenkten Lage bleibt. Ist der der Bell
Anteil zu groß, wippt der Heli wie verrückt hin und her, ist
er zu klein hat man den Eindruck, daß er träge reagiert, und
bei erhöhter Empfindlichkeit beginnt er von alleine zu wackeln.
Nun kam noch der Speed Sensor zum Einsatz.
Zuerst flog ich ohne Einfluß dieses Sensors, und stellte je nach
eingestelltem Paddelgewicht eine mehr oder weniger ausgeprägte Aufbäumtendenz
fest. Nachdem der Sensor aktiviert wurde, konnte man tatsächlich mit
der Einstellung beeinflussen, ob er ein wenig unterschneidet, oder sich
aufbäumt. Die Wirkung liegt also im richtigen Bereich. Eine genauere
Analyse wird hier noch die richtige Abstimung zwischen Wirkstärke
und Begrenzung zeigen.
Fürs erste konnte ich eine Einstellung
finden, die der meines E-Power Helis recht ähnlich ist. Damit war
problemlos etwas Kunstflug möglich. Einige Rollen, Loopings und etwas
Rückenschweben absolvierte die Konstruktion ohne besondere Vorkommnisse.
Der Schwebeflug war vor allem im Bodeneffekt herrlich stabil, dabei war
aber keine Einbuße in der Wendigkeit bei den Kunstflugfiguren zu
verzeichen. Ich hatte den Eindruck, daß der Flip erheblich sauberer
und schneller kommt als beim Power-E, der doch noch etwas mehr nachwippt!
Man darf natürlich nicht vergessen, daß der Heli mit den ganzen
Anbauten etwa 6,5 kg wiegt. Der E-Power hat eine bessere Ausstattung und
wiegt nur 5,7 kg.
Fazit dieses Wochenendes: Die Richtung
Stimmt! Die änderbaren Parameter zeigen ordentlich Wirkung,
und mit dem vorhandenen Regelbereich läßt sich jede Abstimmung
erreichen. Um die genaue Wirkung der einzelnen Einstellungen richtig zu
verstehen, wird es wohl noch eine Weile dauern und viele viele Testflüge
erforderlich machen. Aber das Konzept mit Drehratensensoren und aerodynamischer
Erfassung der Geschwindigkeit scheint richtig zu sein.
Die nächsten Schritte sind nun die
Erstellung einer besseren Platine, die alles nötige beinhaltet, und
eine Anpassung der Wirkbereiche der Parameter auf sinnvolle und sichere
Grenzwerte. Es ist nicht einfach, einen schwingenden Heli wieder heil auf
den Boden zu bringen...
 |
Die
Elektronikbox mit dem Heckrotorkreisel, dem 2-Achs Gyro Sensor und dem
Drucksensor |
 |
Hier
ist die Rohrführung für den Druckaufnehmer zu erkennen. Die Rohre
bestehen aus dünnem Alurohr, und enden ganz grob da, wo eine untenliegende
Stabistange ihre Wirkung erfährt. Der Rotorkopf ist ein Vario CSS
Rigidkopf. |
 |
Anzeige
der Lifedaten während des Betriebes. Dieser Modus dient zur Kontrolle
der Sensoren. Für den Betrieb wird er aber nicht verwendet, da es
Rückwirkungen auf die Rechengeschwindigkeit geben könnte |
 |
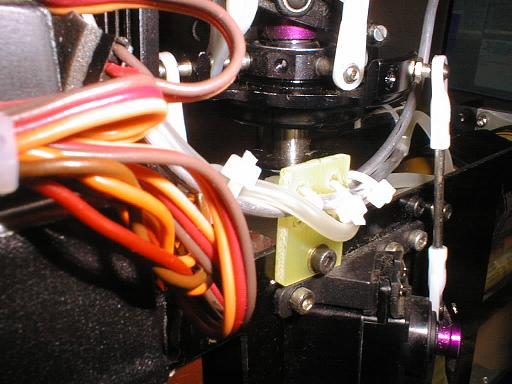
Befestigung
des Druckaufnehmers neben dem Domlager. Der Aufnehmer ist mit Silikonschläuchen
mit dem Sensor verbunden. |
 Inzwischen
hatte ich ein Programm erstellt, mit dem man die Parameter der Schaltung
bequem anpassen kann. Damit konnte ich nun den Differezialteil völlig
ausschalten, und dafür den Bell Anteil erhöhen. Außerdem
war eine Reduzierung der Wirkung des Integrators (Hiller Anteil) erforderlich.
Abwechselnde Flüge mit dem Power-E mit seinem 100% stabilisierten
Normalkopf und dem V-Stabi Heli zeigten eine immer bessere Annäherung
des Verhaltens.
Inzwischen
hatte ich ein Programm erstellt, mit dem man die Parameter der Schaltung
bequem anpassen kann. Damit konnte ich nun den Differezialteil völlig
ausschalten, und dafür den Bell Anteil erhöhen. Außerdem
war eine Reduzierung der Wirkung des Integrators (Hiller Anteil) erforderlich.
Abwechselnde Flüge mit dem Power-E mit seinem 100% stabilisierten
Normalkopf und dem V-Stabi Heli zeigten eine immer bessere Annäherung
des Verhaltens.