Die Elektronik
Hierbei handelt es sich um einen intelligenten
9 auf 12 Kanal Mischer mit Überwachungsfunktion:
 Die
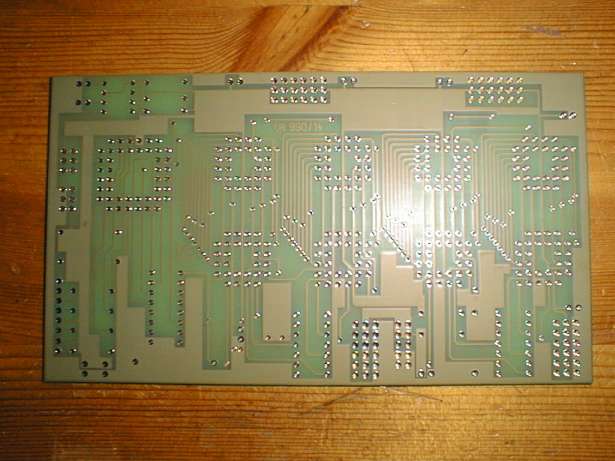
Platine für die Steuerung der Taumelscheiben wurde mit dem Linux Tool
PCB entwickelt und dann mit gcprevue in ein Packet gepackt, um vom PCB
Pool gefertigt werden zu können. Die Prototypfertigung hat tatsächlich
genau 2 Wochen gedauert, bis die Platine per UPS eingetroffen ist.
Die
Platine für die Steuerung der Taumelscheiben wurde mit dem Linux Tool
PCB entwickelt und dann mit gcprevue in ein Packet gepackt, um vom PCB
Pool gefertigt werden zu können. Die Prototypfertigung hat tatsächlich
genau 2 Wochen gedauert, bis die Platine per UPS eingetroffen ist.
Die Qualität war makellos, wie ich
es schon von anderen Platinen gewohnt war. Einige kleine Brücken hat
es gegeben, aber das lag eindeutig an Plazierungsfehlern meinerseits. Außerdem
hatte ich eine Leitung einfach vergessen.
 So
konnte dann die Bestückung beginnen. Auf der Platine befindet sich
ein Atmel AVR Microcontroller, den ich verwende, weil ich dafür den
egcs C-Compiler verwenden kann, der für Linux frei erhältlich
ist. Außerdem hat der Controller 512 Bytes Ram, 8 KB Flash Eprom
und 512 Bytes EEPROM. Das ist eine ideale Ausstattung für diese Anwendung.
So
konnte dann die Bestückung beginnen. Auf der Platine befindet sich
ein Atmel AVR Microcontroller, den ich verwende, weil ich dafür den
egcs C-Compiler verwenden kann, der für Linux frei erhältlich
ist. Außerdem hat der Controller 512 Bytes Ram, 8 KB Flash Eprom
und 512 Bytes EEPROM. Das ist eine ideale Ausstattung für diese Anwendung.
Weiterhin sind 8 Stück Timerbausteine
vom Typ 82C54 auf der Platine vorhanden. Diese Bausteine sind zwar etwas
altmodisch, und wurden früher in den PC's eingesetzt, sie bieten aber
3 unabhängige 16 Bit Timer, die fast ohne externe Beschaltung für
das Einlesen und das Ausgeben von Fernsteuerimpulsen geeignet sind. Nur
beim Ausgang ist ein Inverter erforderlich, da der Ausgang low-aktiv ist.
Der Gate Eingang kann direkt mit dem Fernsteuerausgang des Empfängers
oder Kreisels verbunden werden.
Für geübte,
hier ein Blick in den Quelltext (stand 12.Aug. 1999)
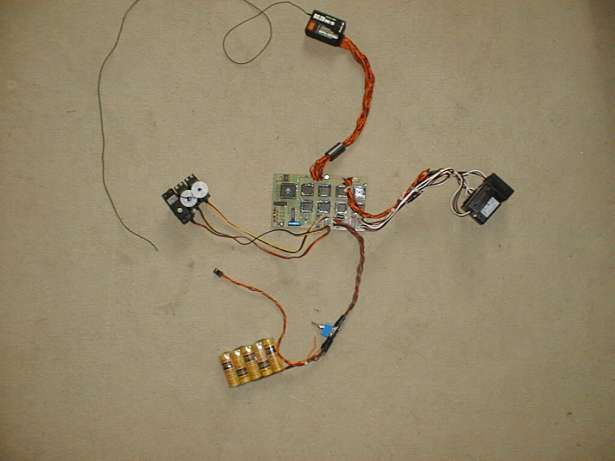
 So
sieht der gesamte Einbau für die Steuerung aus. Der Empfänger
ist über 6 Kanäle mit der Platine verbunden. Er erhält über
die Kanalstecker auch seine Stromversorgung. Rechts ist die Kreiselplattform
zu erkennen, diese besteht aus 3 Robbe 3D-Gyros, die im 90 Grad Winkel
zueinander angeordnet sind.
So
sieht der gesamte Einbau für die Steuerung aus. Der Empfänger
ist über 6 Kanäle mit der Platine verbunden. Er erhält über
die Kanalstecker auch seine Stromversorgung. Rechts ist die Kreiselplattform
zu erkennen, diese besteht aus 3 Robbe 3D-Gyros, die im 90 Grad Winkel
zueinander angeordnet sind.
Die Belegung der Anschlüsse der Schaltung
sieht so aus:
| Anschluß |
Beschreibung |
| Eingang 1 |
Kanal 1 des Empfängers: Pitch |
| Eingang 2 |
Kanal 2 des Empfängers: Roll |
| Eingang 3 |
Kanal 3 des Empfängers: Nick |
| Eingang 4 |
Kanal 4 des Empfängers: Heck |
| Eingang 5 |
Kanal 5 des Empfängers: Sonderfunktion |
| Eingang 6 |
Kanal 6 des Empfängers: Kreiselempfindlichkeit |
| Eingang 7 |
Ausgang Kreisel Roll |
| Eingang 8 |
Ausgang Kreisel Nick |
| Eingang 9 |
Ausgnag Kreisel Heck |
| Ausgang 1 |
Servo hinterer Rotor: hinten |
| Ausgang 2 |
Servo hinterer Rotor: links |
| Ausgnag 3 |
Servo hinterer Rotor: rechts |
| Ausgang 4 |
Servo vorderer Rotor: hinten |
| Ausgang 5 |
Servo vorderer Rotor: links |
| Ausgang 6 |
Servo vorderer Rotor: rechts |
| Ausgang 7 |
Kreisel Roll Eingang |
| Ausgang 8 |
Kreisel Roll Empfindlichkeit |
| Ausgang 9 |
Kreisel Nick Eingang |
| Ausgang 10 |
Kreisel Nick Empfindlichkeit |
| Ausgang 11 |
Kreisel Heck Eingang |
| Ausgang 12 |
Kreisel Heck Empfindlichkeit |
Hier nun noch einige Detailbilder der einzelnen
Komponenten:



 Die
Platine für die Steuerung der Taumelscheiben wurde mit dem Linux Tool
PCB entwickelt und dann mit gcprevue in ein Packet gepackt, um vom PCB
Pool gefertigt werden zu können. Die Prototypfertigung hat tatsächlich
genau 2 Wochen gedauert, bis die Platine per UPS eingetroffen ist.
Die
Platine für die Steuerung der Taumelscheiben wurde mit dem Linux Tool
PCB entwickelt und dann mit gcprevue in ein Packet gepackt, um vom PCB
Pool gefertigt werden zu können. Die Prototypfertigung hat tatsächlich
genau 2 Wochen gedauert, bis die Platine per UPS eingetroffen ist.